Saída corrente 1. Breve Introdução
1.1 Visão geral
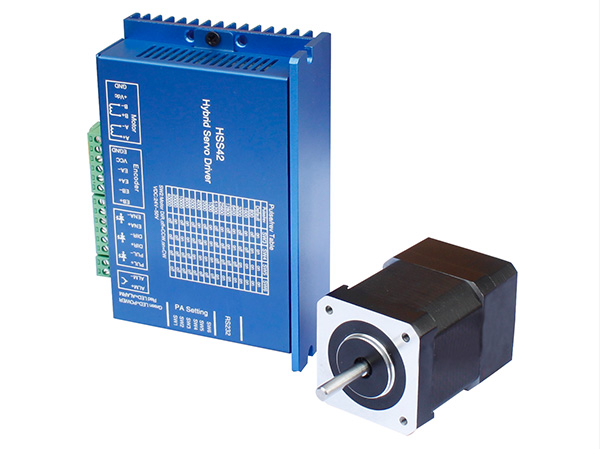
O 3HSS2260 é um servo driver híbrido de alta potência. Ele se encaixa no motor de passo trifásico 86 (NEMA34) e 110 (NEMA42). Comparado ao driver de passo de loop aberto tradicional, este servo driver de passo pode evitar completamente o problema de passo perdido do motor de passo, a diminuição de torque de alta velocidade é extremamente menor do que o driver de passo de loop aberto, melhorar muito o desempenho e o torque do motor de alta velocidade. A corrente do motorista pode ser controlada automaticamente com base na carga, restringe eficazmente o aumento da temperatura do motor, prolonga a vida útil do motor. A posição incorporada e a saída do sinal de alarme são convenientes para o computador host monitorar e controlar o estado de funcionamento do motor. A função do alarme de erro da posição excessiva assegura o equipamento trabalhando com segurança. É a substituição ideal e atualização do driver de circuito aberto tradicional, e também é com funções de parte do sistema servo AC, o preço é apenas metade do sistema AC.
1.2 Características
★ DSP de 32 bits e tecnologia de controle de circuito fechado vetorial
★ Sem perder passo, alta precisão na posição
★ Melhorar o torque de saída do motor e a velocidade de trabalho
★ Tecnologia de controle de corrente variável, contenha o aumento da temperatura do motor
★ Adapte-se à variedade de condições mecânicas da carga (incluindo polias da baixa rigidez), nenhuma necessidade de ajustar o parâmetro do ganho
★ Movimento suave e confiável, baixa vibração, grande melhoria em acelerar e desacelerar
★ A capacidade de velocidade zero estática sem vibração
★ Adapte-se ao servo motor híbrido de 3 fases 86 (NEMA34) e 110 (NEMA42)
★ Frequência máxima do passo-pulso 200KHZ
★ Micro passo 200-65535 pulso/rev
★ Faixa de tensão AC150-220V
★ Proteção sobre corrente, sobre tensão e sobre posição
★ Seis display de tubo digital, fácil de definir parâmetros e monitorar o estado de funcionamento do motor
1.3Aplicações
É apropriado para o equipamento de automação e instrumentação que exigem grande torque, tais como: máquina de gravação, máquina de costura, máquina de decapagem de fio, máquina de marcação, máquina de corte, máquina de composição de foto a laser, instrumento de plotagem, máquina-ferramenta de controle numérico, equipamento de montagem automática e assim por diante. É com bom desempenho no equipamento com pouco ruído e alta velocidade.
2. Índice técnico
Tensão de entrada | AC150~220V (use tipicamente 220VAC) |
Saída actual | Pico 6.0A (variável atual baseada na carga) |
Entrada de Corrente Lógica | 7~20mA |
Frequência | 0~200KHz |
Motor adequado | Servomotor hybird de 3 fases NEMA34 e NEMA42 |
Resolução do Codificador | 1000 |
Resistência de isolamento | >=500MΩ |
2.2 Índice ambiental
Método de arrefecimento | Refrigeração natural ou refrigeração forçada por ar |
Ambiente de trabalho | Evite poeira, névoa de óleo e gases corrosivos |
Temperatura de trabalho | 0~50℃ |
Umidade | 40~90%UR |
Vibração | 5,9m/s 2 Máx. |
Ambiente de Armazenamento | -20℃~65℃ |
Peso | Aproximadamente 1500g |
2.3 Especificação mecânica

3.Interface Ports
3.1 Portas de interface de alimentação 1
Porto | Símbolo | Definição | Observação |
1 | L | Potência do motor Conector para 220AC | |
2 | N | ||
3 | NC | Não Ligado | |
4 | BR | Resistor de travagem | Travagem externa resistor ligado entre Br e P+ |
5 | P+ | Tensão da barra de barramento CC |
3.2 Portas de interface de alimentação 2
Porto | Símbolo | Definição | NEMA34 | NEMA42 |
1 | U | Porta de Ligação do Motor U | Vermelho | Preto |
2 | V | Porta de Ligação do Motor V | Preto | Castanho |
3 | W | Porta de Ligação do Motor W | Azul | Azul |
4 | PE | Solo | amarelo | amarelo |
5 | L | Controlador de energia Ligar a 220VAC | Gama AC150-220V | |
6 | N | |||
3.3 Portas de interface de sinal de controle (44 pinos DB)
Porto | Símbolo | Definição | Observação |
3 | PUL+ | Entrada de sinal de pulso + | |
4 | PUL... | Entrada de sinal de pulso - | |
5 | DIR+ | Entrada do sinal de direcção + | |
6 | DIR... | Entrada do sinal de direcção - | |
7 | ALM+ | Saída do Sinal de Alarme + | |
8 | ALM... | Saída do Sinal de Alarme - | |
9 | PEND+ | Posição Saída do Sinal + | |
10 | PEND... | Posição de saída do sinal - | |
11 | ENA+ | Activar a Entrada de Sinal + | |
12 | ENA- | Activar a Entrada de Sinais - | |
23 | OA+ | Saída do Codificador A | Codificador A, B, Z Sinal acionamento diferencial(26LS31) saída, saída não isolada. Se o motor apenas com A,B dois codificador de canais, depois ignore o Z canal. |
24 | OA... | ||
25 | OB+ | Saída do Codificador B | |
26 | OB- | ||
27 | OZ+ | Saída Z do Codificador | |
28 | OZ... |
29 | CZ | Codificador Z colector aberto saída | |
30 | GND | Solo |
3.3.1 Portas de interface de saída de sinal (Pend & ALM)
Pend e circuito de saída de sinal ALM usam optoupler Darlington, pode ser conectado com o relé ou optoupler. Observe os seguintes pontos:
★ Use uma fonte de alimentação para fornecer a energia para a resposta ou optoupler, o driver será queimado se a fonte de alimentação estiver incorreta.
★ Fonte de alimentação Máximo 25VDC, Máximo de corrente 50mA.
★ Se usar carga indutiva, como um relé, um diodo deve ser paralelo com a carga indutiva, e se a polaridade do diodo for invertida, o driver será danificado.
★ Quando ligado, há cerca de 1V ou mais queda de pressão, não pode atender aos requisitos de baixo nível TTL, por isso não pode ser conectado com a corrente TTL.

3.3.2 Portas de interface de entrada de sinal (PUL, DIR, ENA)
★ Ligações ao Sinal Diferencial

★ Ligações ao ânodo comum

★ Conexões ao cátodo comum

Entrada de sinal de 5V. Se a entrada do sinal 12V, o resistor adicional 1KΩ precisa ser conectado. Se a entrada do sinal 24V, o resistor adicional 2KΩ precisa ser conectado.
3.4 Portas de interface de entrada de sinal codificador (15 pinos DB)
Porto | Símbolo | Definição | Observação |
1 | EA+ | Entrada do Codificador A+ | Se o motor apenas com A,B dois codificador de canais, depois ignore o Z canal. |
11 | EA- | Codificador A- Entrada | |
2 | EB+ | Entrada do codificador B+ | |
12 | EB... | Codificador B- Entrada | |
7 | EZ+ | Entrada Z+ do Codificador | |
8 | EZ- | Codificador Z- Entrada | |
13 | VCC | +5V | |
3 | GND | Solo |
3.5 Portas de interface de comunicação RS232
Porto | Símbolo | Definição |
1 | NC | Não Ligado |
2 | +5V | Para HISU Externa |
3 | TxD | Porta de Transmissão RS232 |
4 | GND | Solo |
5 | RxD | Porta de recepção RS232 |
6 | NC | Não Ligado |
4. Cablagem
4. 1 Diagrama Típico de Wring

5. Parâmetros
5. 1 Parâmetro Configurar
Código | Definição | Intervalo | Valor Predefinido | Observação |
PA0 | Ligar o Ecrã | 0~7 | 0 | |
PA1 | Selecção do Modo de Controlo | 0~1 | 1 | 0-Open loop, 1=Circuito fechado |
PA2 | Loop Actual Kp | 1000 | Proibido de Modificar | |
PA3 | Ki do Ciclo Actual | 200 | Proibido de Modificar | |
PA4 | Loop de Posição Kp | 0~1000 | 300 | |
PA5 | Loop de Velocidade Kp | 0~1000 | 400 | |
PA6 | Ki do Loop de Velocidade | 0~300 | 80 |
PA7 | Configuração dos Micro Passos | 200~65535 | 4000 | |
PA8 | Resolução do Codificador | 4000 | 1000 linhas (4 vezes) | |
PA9 | Limite de Erros de Posição | 40~65535 | 1000 | |
PA10 | Manter a Percentagem Actual | 0~80 | 30 | Unidade: 100MA |
PA11 | Corrente do Loop Fechado Percentagem | 1~80 | 60 | Unidade: 100MA |
PA12 | Selecção do Tipo de Motor | 0-2 | 0 | Não é necessário seleccionar |
PA13 | Tempo de Filtragem | 0~1500 | 60 | Unidade: 66,7μs |
PA14 | Activar o Nível | 0/1 | 1 | |
PA15 | Nível do Alarme | 0/1 | 0 | |
PA16 | Selecção do Modo de Pulso | 0/1 | 0 | 0-PUL/DIR 1-CW/CCW |
PA17 | Borda do Pulso | 0/1 | 0 | |
PA18 | Direcção de rotação do motor | 0/1 | 0 | |
PA19 | Velocidade JOG | 1~600 | 120 | Unidade: rpm |
PA20 | Secção do Modo PEND | 0/1 | 0 | |
PA21 | Nível PEND | 0/1 | 0 | |
PA22 | Aceleração | 1~2000 | 200 | Unidade: r/s^2 |
PA23 | desaceleração | 1~2000 | 200 | Unidade: r/s^2 |
5.2 Descrição do parâmetro
Código | Definição | Descrição | Intervalo |
PA0 | Ligar o Ecrã | Quando o condutor está ligado, o mostra: ★ 0: Erro de localização ★ 1:Velocidade do motor ★ 2:Velocidade dada ★ 3: Pulso de Feedback ★ 4:Dado Pulso ★ 5:Dada a Actualidade ★ 6:Código de erro ★ 7:Tensão de barramento | 0~7 |
PA1 | Selecção do Modo de Controlo | ★ 0: Modo de loop aberto: Recebendo o sinais apenas da entrada do sinal portas, o motor está aberto controlado pelo condutor. Corrente do motor depende da exploração current( PA10) ★ 1: Modo de circuito fechado: Recebendo os Sinais da entrada de sinal portas e o codificador, o motor posição fechada controlada por | 0~1 |
o motorista. A corrente do motor é automática alterado com base na carga | |||
PA2 | Loop Actual Kp | Proibido de Modificar | |
PA3 | Ki do Ciclo Actual | Proibido de Modificar | |
PA4 | Loop de Posição Kp | ★ Quanto maior o valor definido, maior o valor ganho e maior rigidez, e o menor atraso de posição abaixo do mesmo Condição de pulso de comando de frequência. Mas muito grande valor, pode causar Sistema instável de oscilação. O valor configuração depende da carga. | 0~1000 |
PA5 | Loop de Velocidade Kp | 0-1000 | |
PA6 | Ki do Loop de Velocidade | 0-300 | |
PA7 | Configuração dos Micro Passos | 200-65535 | |
PA8 | Resolução do Codificador | ★ linha do codificador é 1000 linhas, o PA8 o valor padrão é 4 vezes do codificador linhas | |
PA9 | Limite de Erros de Posição | ★ No circuito fechado e no modo JOG, se o erro de posição exceder a configuração valor, o motorista entrará em posição alarme de erro. | 40~65535 |
PA10 | Manter a Corrente | ★ Manter actual=configuração valor*100MA | 0~80 |
PA11 | Corrente do Loop Fechado | ★ Corrente do ciclo fechado=configuração valor*100MA | 1~80 |
PA12 | Selecção do Tipo de Motor | Não é preciso select | |
PA13 | Tempo de Filtragem | Tempo de filtragem=valor de definição*66,7 μs | 0-1500 |
PA14 | Activar o Nível | ★ 0: Quando o optoupler de entrada ENA transistor está desligado (cortado), motor é Permitir; Quando a entrada ENA optoupler transistor está ligado (condutor), motor é Livre. ★ 1: Quando o optoupler de entrada ENA transistor está ligado (condutor), motor é Permitir; Quando a entrada ENA optoupler transistor OFF (corte), motor é livre. | 0~1 |
PA15 | Nível do Alarme | ★ 0: Quando alarme, saída optoupler O transistor está ligado (condutor); Quando Optocoupler de saída normal O transistor está DESLIGADO (cortado) ★ 1: Quando alarme, saída optoupler O transistor está desligado (desligado); Quando | 0~1 |
Optocoupler de saída normal O transistor está ligado (condutor) | |||
PA16 | Selecção do Modo de Pulso | ★ 0: Modo PUL/DIR ★ 1:Modo CCW/CW | 0~1 |
PA17 | Borda do Pulso | ★ 0: Normal ★ 1: Input command pulse reverse polaridade | 0~1 |
PA18 | Direcção de rotação do motor | ★ 0: rotação do motor no sentido horário ★ 1:Rotação anti-horário | 0~1 |
PA19 | Velocidade JOG | 1~600 | |
PA20 | Secção do Modo PEND | ★ 0: PEND como sinal de saída de posição. ★ 1:PNED como sinal de saída do travão. | 0~1 |
PA21 | Nível PEND | ★ 0:Ao posicionar ou travar OK, o transistor optoacoplador de saída é ON (condutor); caso contrário, saída Optocoupler transistor está desligado (cut off) ★ 1:Ao posicionar ou travar OK, o transistor optoacoplador de saída é DESLIGADO (corte); caso contrário, saída O transistor optoacoplador está ligado (condutor) | 0~1 |
PA22 | Aceleração | Unidade: r/s^2 | 1-2000 |
PA23 | desaceleração | Unidade: r/s^2 | 1-2000 |
6. Função de alarme
6. 1 Configurar o Alarme
Código ALM | Definição do Alarme | Descrição |
-- | A funcionar bem | |
1 | Sobre a corrente | A corrente do motor está muito alta. |
2 | Sobretensão | Tensão de energia do circuito principal é muito alta |
3 | Erro de desvio de posição | O desvio de posição excede o valor definido. |
4 | Falha EEPROM | Falha EEPROM |
6.2 Método de processamento para alarmes
Código ALM | Definição do Alarme | Razão | Método de transformação |
1 | Sobre a corrente | Condutor U, V, W curto-circuito. | Verifica a fiação. |
Problema de aterramento | Verificar o terreno. | ||
O isolamento do motor está danificado | Mudar um novo motor. | ||
O condutor está danificado | Mudar um novo motorista. |
2 | Sobretensão | Quando a energia estiver ligada, a tensão é demasiado alta ou demasiado baixo. | Verificar a entrada poder. |
A fiação do resistor de travagem é desconectado repentinamente quando O motor está a funcionar. | A religar. | ||
O resistor de travagem ou transistor de travagem é danificado. | Mudar um novo motorista. | ||
3 | Erro de desvio de posição | Quando a energia de controlo é girada Ligado, a placa de circuito está danificada. | Mudar um novo motorista. |
Se o motor U, V, W estiver errado escrita ou codificadora errada torcer, o motor será marcha reversa ou não trabalho, | A religar. | ||
O codificador está danificado | Mudar um novo motorista. | ||
O valor do desvio de posição O alcance é muito pequeno. | Aumentar a desvio de posição intervalo de valores. | ||
O laço de posição Kp está demasiado baixo. | Aumentar a loop de posição Kp valor. | ||
Torque insuficiente. | Reduzir a carga ou alterar um valor superior motor de torque. | ||
A frequência de pulso do comando é demasiado alto. | Reduzir o frequência. | ||
4 | Falha EEPROM | Chip ou placa de circuito é danificado. | Mudar um novo motorista. |
Há interferência no processo de leitura e escrever EEPROM. | Repor a predefinição parâmetros. |
7. Display e painel
O painel é composto por 6 displays de tubo digital LED e 5 botões
incluindo ←、↑、↓、 S(Shift),ENT.
‘ ←’: Sair ou Cancelar
‘ ↑’: Aumentar ou Seguinte
‘ ↓’: Diminuir ou Anterior
'S': dígitos de deslocamento para a esquerda

ENT': Entrar ou confirmar
7. 1 Exibição do Menu Principal
O modo de operação é selecionado no menu principal. Existem 4 modos de operação: modo monitor, configuração de parâmetros, gerenciamento de parâmetros e modo JOG. Carregue no botão ↑ e ↓ para alterar o modo, pressione o botão ENT para entrar no submenu, pressione o botão ← para voltar ao menu principal.

7. 2 Apresentação do Sub Menu
7.2.1 Modo Monitor
Escolha 'dP-' no menu principal, pressione o botão ENT para o modo monitor. Há 8 status de exibição, pressione o botão ↑ e ↓ Para escolher o status, pressione o botão ENT para mostrar o valor exato.

7.2.2 Configuração dos parâmetros
Escolha "PA-" no menu principal, pressione o botão ENT para o modo de configuração de parâmetros. Existem 23 códigos de parâmetro de PA01 a PA23, pressione o botão ↑ e ↓ para escolher o código do parâmetro, pressione o botão ENT para mostrar o valor do parâmetro. Pressione o botão ↑ e ↓ pode modificar os valores. Botão S pode deixar merda os dígitos, e pressionar o botão ↑ e ↓ para aumentar ou diminuir o dígito brilhante. Pressione o botão ENT pode confirmar a modificação. Se você não satisfazer o valor modificado, não pressione o botão ENT em vez disso para pressionar o botão ← para voltar ao valor original.

7.2.3 Gestão de parâmetros
O gerenciamento de parâmetros processa principalmente a operação entre configuração de parâmetros e EEPROM. Escolha 'EE-' no menu principal, pressione o botão ENT para o modo de gerenciamento de parâmetros. Existem 3 modos: EE-Set, EE-rd e EE-dEF.
EE-Set: 'parameter write into', significa escrever os parâmetros na área EEPROM. Se os usuários modificarem apenas os parâmetros, mas não escreverem na área EEPROM, o parâmetro modificado não será armazenado, ele restaurará o valor original quando ligar a próxima vez. Mas se o parâmetro escrever na área EEPRPOM, será o valor modificado quando ligar a próxima vez.
EE rd: 'parâmetro lido', significa ler o parâmetro na área EEPROM para área RAM. Este processo será executado uma vez no poder. No início, o valor do parâmetro do espaço RAM é o mesmo que na área EEPROM. Mas quando o usuário muda os parâmetros, ele mudará os valores do parâmetro de espaço RAM. se o usuário não estiver satisfeito com os valores modificados ou os valores do parâmetro forem perturbados, a operação de leitura do parâmetro pode ler o parâmetro na área EEPROM novamente no espaço RAM.
EE-dEF: 'reset de fábrica', significa restaurar o valor padrão para o espaço RAM e, enquanto isso, gravar na área EEPROM. A operação pode ser usada quando os usuários perturbam os parâmetros e não podem funcionar corretamente.
Tome EE-Set como exemplo: Escolha o modo EE-Set, pressione o botão ENT e segure 3 segundos, o display mostra 'Start', o que significa que os parâmetros estão gravando no EEPROM, após 1-2 segundos, se a operação EE-Set for bem sucedida, o display mostrará 'Done', se a operação falhar, o display mostrará 'Erro'. Pressione o botão ← pode voltar ao menu principal.

7.2.4 Modo JOG
Modo JOG: defina PA1 = 2, deixe o modo de controle para ser o modo JOG. Defina a velocidade JOG por PA19,e ajustando a aceleração e desaceleração da velocidade JOG por PA22 e PA23. Escolha o JOGmodo no menu principal. Pressione o botão ↑ e segure, o motor funcionará na velocidade JOG, Liberebotão ↑, o motor irá parar e manter em 0 velocidade. Pressione o botão ↓ E espera, motor.vai correr ao contrário. Botão de libertação ↓ , o motor irá parar e manter em 0 velocidade.
Sítio Web
Produtos
Contacte-nos
Móvel